Mit störfaktor: flip and switch etc… See L24 Anfang → Kap 8.1
oder:
- spezielle Lösung finden
- wenn nichts wegzukürzen ist muss man neu ausrechnen → es ist immer was wegzukürzen.
8.1 Einleitung
8.1 (Gewöhnliche) Differentialgleichung
Unter einer (gewöhnlichen) Differentialgleichung (engl. (ordinary) differential equation) verstehen wir eine Gleichung, in welcher die gesuchte Funktion sowie deren Ableitungen auftreten, also eine Gleichung der Form
wobei vorgegeben ist.
Dabei heisst unabhängige Variable (engl. independent variable) und abhängige Variable (engl. dependent variable).
Wir können ODEs anhand von mehreren Kategorien klassifizieren:
- Ordnung (Order) ODE ist von Ordnung falls die höchste Ableitung in der Gleichung ist. ist von 2er Ordnung z.B.
- Linearität (Linearity) alle Ableitungsterme müssen sein. ist nicht linear. ist linear (die Koeffizienten können irgendwelche Funktionen sein)
- Homogenität (Homegeneity) Alle terme enthalten oder eine Ableitung.
- i.e. die Störfunktion .
- Wenn , nennen wir die ODE inhomogen.
Example:
- Newtonsches Abkühlungsgesetz
- wo und konstanten sind.
- Das ist eine inhomogene ODE erster Ordnung mit Störfunktion .
- Bimolekulare Reaktion
- Störfunktion .
- beschreibt die Produktion eines Stoffes aus zwei Anfangsstoffen mit Konzentration .
- Logistische Gleichung
- Der Term macht diese Gleichung nicht-linear.
- Beschreibt Populationsgrösse, deren Wachstum durch beschränkt ist
8.2 Grundlagen
8.6 Superpositionsprinzip
Sind und Lösungen einer linearen, homogenen Differentialgleichung, so ist auch
eine Lösung der gleichen Differentialgleichung.
Proof (Intuitive) Sei die homogene ODE. Dann gilt und .
Dann muss auch sein. Dies hält da der Operator linear ist:
- und dann können wir umformen und erhalten .
8.7 Fundamentallösungen
Eine lineare, homogene Differentialgleichung der Ordnung (mit konstanten Koeffizienten) besitzt Lösungen , sodass die allgemeine Lösung gegeben ist durch
Note: die Fundamentallösungen spannen den -dimensionalen Lösungsraum als Basisvektoren.
8.3 Lineare, homogene DGL mit konstanten Koeffizienten (beliebiger Ordnung)
Wir wollen lineare, homogene Differentialgleichungen mit konstanten Koeffizienten lösen:
Eulerscher Ansatz
Wir verwenden , als Funktion.
Note: das kommt daher, dass der Eigenvektor des Operators (differenzierung) ist: .
Wir setzen also unseren Ansatz ein und erhalten:
was uns das charakteristische Polynom gibt. löst die Gleichung also genau dann, wenn eine Lösung von ist.
Wir wissen dank des Fundamentaltheorems der Algebra aus der Linearen Algebra das jede homogene Gleichung -ten grades Lösungen hat (komplexe treten in Paaren auf).
Wenn wir die Lösungen die wir durch die Nullstellen erhalten mit dem Superpositionsprinzip addieren, erhalten wir die allgemeine Lösung.
8.9 Allgemeine Lösung (konstante Koeffizienten)
Die allgemeine Lösung von , , lautet:
- Falls alle Nullstellen reell sind mit Multiplizität :
- Falls reelle Nullstellen und Paare komplexer Nullstellen mit Multiplizität auftreten:
8.3.1 Spezialfall 1 - Komplexe Lösungen
Wenn die Lösung etwa ist
- haben wir
- wobei und
- Dann sind sowohl und eine Lösung
Note: nicht weil der Imag. Teil von ist, nicht !
Proof:
- means is a solution
- (apply linearity)
- Thus and (a complex number is zero iff both real and imaginary part are 0)
Beachte, wenn die Koeffizienten komplex wären, wäre das hier nicht so easy
8.3.2 Spezialfall 2 - Wiederholte Wurzeln
(Lösungen mit Multiplizität > 1)
Sei
- (double root)
Dann haben wir .
- Nehme an die zweite Lösung ist .
- Wir berechnen die Ableitungen:
- Dann gilt
- Wir setzen in die ODE ein:
Durch zweifaches integrieren erhalten wir:
- und dann gilt
Wir wählen und als einfachste neue Wahlen, um eine neue Lösung zu erhalten.
- Angenommen wir hätten und gewählt
- dann gilt
- Dann sind und und es gilt .
8.4 Anfangs- und Randwertprobleme
In einer ODE mit konstanten Koeffizienten für die wir die allgemeine Lösung bestimmen, erscheinen auch Konstanten.
Wollen wir diese bestimmen, brauchen wir also auch Informationen. Ohne diese erhalten wir nur eine Familie an Funktionen.
8.4.1 Randwertproblem
Wenn wir die Information an zwei unterschiedlichen Stellen vorgegeben kriegen, i.e. und , dann reden wir von einem Randwertproblem.
Beispiel: Das folgende ist ein Randwertproblem:
Allgemeine Lösung .
Aus folgt ; aus folgt .
Gesuchte Lösung:
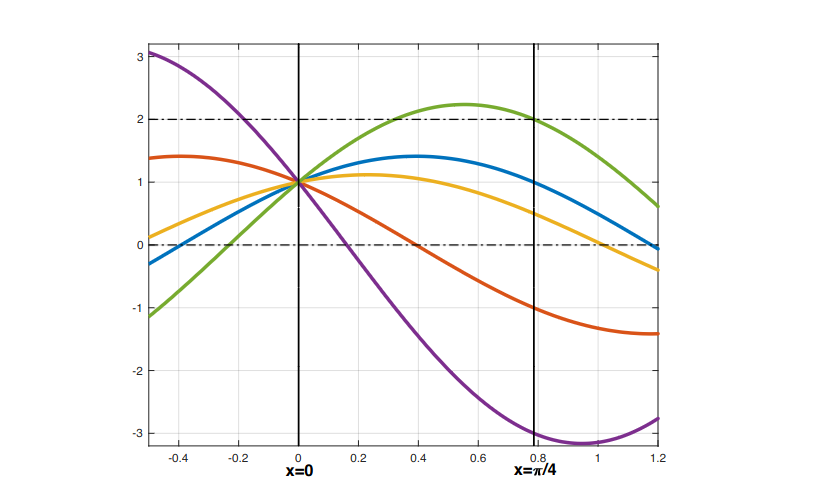
8.4.2 Anfangswertproblem
Wenn wir mehrere Information an einer Stellen vorgegeben kriegen, für die Ableitungen, i.e. und dann reden wir von einem Anfangswertproblem.
Beispiel: Das folgende System etabliert ein Anfangswertproblem:
Charakteristisches Polynom:
Allgemeine Lösung: .
Aus folgt . Aus folgt .
Gesuchte Lösung:
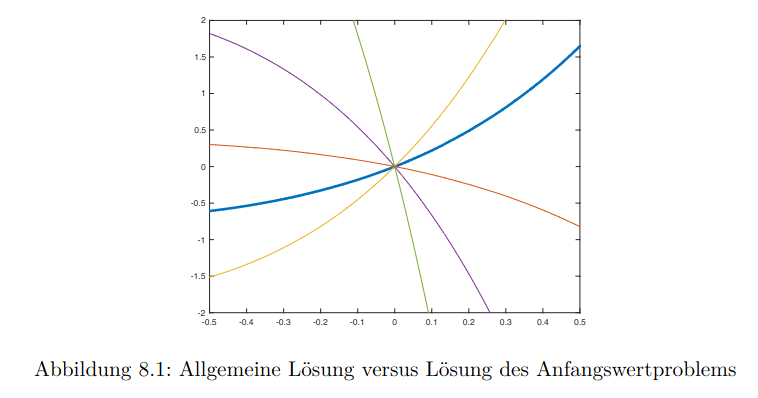
Note: Die Ordnung einer ODE gibt uns also an:
- Grad des charakteristischen Polynoms
- Anzahl Fundamentallösungen
- Anzahl freier Parameter
- Nötige zusätzliche Information um eine spezifische Lösung zu finden.
8.5 Inhomogene Probleme
8.12 Zugehörige homogene Differentialgleichung
Ist eine inhomogene DGL gegeben, so heisst
die dazugehörige homogene Differentialgleichung.
8.13 Struktur der Lösungsmenge
Ist eine partikuläre Lösung einer linearen, inhomogenen DGL mit konstanten Koeffizienten und die allgemeine Lösung der zugehörigen homogenen DGL, so ist
die allgemeine Lösung der inhomogenen Differentialgleichung.
Beweis: Wir zeigen zunächst, dass die inhomogene DGL löst:
Umgekehrt sei eine weitere Lösung der inhomogenen DGL. Dann gilt für
d. h. löst die homogene DGL und ist somit in enthalten.
8.5.1 Spezielle Lösung finden
Ansätze für partikuläre Lösungen. Leitidee:
- Störfunktion = Polynom -ten Grades Ansatz: Polynom gleichen Grades.
- Störfunktion = Schwingung Ansatz: Schwingung gleicher Frequenz.
- Störfunktion = Polynom Exponentialfunktion Ansatz: gleiches Produkt.
| Störfunktion | Ansatz für |
|---|---|
| Polynom | |
| Spezialfall: ist -fache Nullstelle von | |
| Exponentialfunktion | |
| Spezialfall: ist -fache Nullstelle | |
| Schwingung | |
| Spezialfall: ist -fache Nullstelle |
Note: wie in Beispiel klar wird, können hier auch Polynome oder komplexere Funktionen sein → die Regeln gelten nicht rekursiv.
- für gilt nicht, dass wenn sowohl eine -fache Nullstelle von ist UND 0 eine -fache Nullstelle von ist, dass wir mit multiplizieren müssen.
- Ex: für gilt das die Nullstellen sind.
- es gilt also Regel 2b → ist -fache Nullstelle
- aber ist auch eine Nullstelle des Polynoms und wir haben ein Polynom in ???
- da wir aber einen Faktor haben, gilt nur 2b und nicht sowohl 1b als auch 2b.
Note 2: warum wird im Falle eines polynomischen nur Nullstelle einbezogen, während für jedes zählt?
- der Fall polynom ist einfach ein Spezialfall von → deswegen im Polynomfall nur als Nullstelle.
Beispiel: .
- Homogenes Polynom , also .
- Da keine Nullstelle ist, wählen wir .
- Mit , ergibt Einsetzen
- Koeffizientenvergleich liefert das System mit Lösung ,
Beispiel 2:
- Homogenes Polynom , also
- Da Nullstelle ist (Spezialfall ist -fache Nullstelle), wählen wir
- Mit und ergibt Einsetzen
- also mit Lösung , , .
8.6 Differentialgleichungen erster Ordnung
8.6.1 Trennung der Variablen
Es geht um Diff. Gl. der Form: .
Unser Ansatz um diese zu lösen ist die Trennung der Variablen:
- alle Ausdrücke mit der unabhängigen Variablen auf die eine
- alle mit der abhängigen auf die andere Seite bringen
Dann beide Seiten unbestimmt integrieren.
Beispiel 8.15: Newtonsches Abkühlungsgesetz .
- Umschreiben (Separation der Variablen):
- Unbestimmtes Integrieren:
- und Auflösen nach :
Beispiel 8.16:
- Trennen:
- Integrieren:
- lösung:
8.17 Rechtfertigung der Trennung der Variablen bzw. Stammfunktionen von bzw. von . Dann gilt
Es seien
Beweis:
- „”: Ist Lösung von , so folgt
- also $G(y(x)) - F(x) = C$, $C \in \mathbb{R}$ (8.3).
- „”: Gilt umgekehrt , so
- d. h. $y(x)$ löst $y'(x) = g(y)\cdot f(x)$.
Zusammenfassend können wir schreiben:
8.18 Homogene lineare DGL erster Ordnung
Sei stetig und betrachte für alle . Ist eine Stammfunktion von , so sind alle -Lösungen von der Form
Beweis:
- Sei zunächst . Dann
- Sei umgekehrt eine Lösung, d. h. mit und (dann gilt ).
- In der Terminologie von Lemma 8.17 ist , und löst die DGL genau dann, wenn , also
Note: only makes sense for . For , has to be and thus it’s also in that family.
8.6.2 Substitution
Idee (wie bei der Integration): durch Einführung einer neuen Grösse das Problem vereinfachen.
Wir führen hier als Substitution ein.
Beispiel 8.19 (logistische Gleichung):
- Ableiten von via Kettenregel:
- Trennen, integrieren, auflösen:
- Rücksubstitution, nicht vergessen!:
8.6.3 Lineare Substitution
Beispiel 8.20: . Variablen nicht trennbar.
- Substitution .
- Ableiten:
- Lösen: , also ,
- Rücksubstitution:
Merkregel (lineare Substitution)
Eine DGL der Form
lässt sich durch die lineare Substitution in eine DGL mit trennbaren Variablen überführen. Dabei
Note: Die unabhängige Variable kommt rechts nicht mehr explizit vor — eine solche DGL heißt autonom.
Beispiel 8.21: . Substitution .
- Ableiten:
- Lösen: , also
- Rücksubstitution: , mit .
8.6.4 In den Variablen homogene Differentialgleichungen
Beispiel 8.22: .
- Substitution
- Ableiten nach x:
- note that $y' = \frac{y}{x} + \frac{x^2}{y^2} = z + z^{-2}$ by the DGL that's where the right side comes from.
- Integrieren:
- Rücksubstitution
Merkregel (homogen in den Variablen)
Eine DGL der Form
heisst homogen in den Variablen (engl. homogeneous in the variables) und lässt sich mit der Substitution in eine DGL mit trennbaren Variablen überführen.
8.6.5 Variation der Konstante
Die Variation der Konstante funktioniert sogar, wenn die DGL erster Ordnung nicht linear ist oder keine konstanten Koeffizienten hat:
- Die in auftretende Konstante wird durch eine noch zu bestimmende Funktion der unabhängigen Variablen ersetzt.
Beispiel 8.23: .
- Homogene Lösung
- Ansatz → hängt von unabhängiger Variable ab
- Einsetzen:
- Partielle Integration:
- Dies liefert die partikuläre Lösung und damit
Beispiel 8.24: . Zugehörige homogene DGL , per Trennung , Lösung . Ansatz .
- Einsetzen:
- also , und schließlich
8.25 Variation der Konstante (Lösungsformel)
Seien stetig und betrachte die inhomogene DGL erster Ordnung
Sei eine Stammfunktion von und eine Stammfunktion von . Dann sind alle -Lösungen von der Form
Beweis:
- Sei zunächst . Dann (mit )
- Umgekehrt sei die allgemeine Lösung der homogenen DGL ; nach Lemma 8.17 und Satz 8.18 ist .
- Die Variation der Konstante gibt den Ansatz . Einsetzen ergibt (nach Wegkürzen)
d. h. muss eine Stammfunktion von sein.
8.8 Existenz- und Eindeutigkeitssatz
Bisher: wie löst man eine DGL.
Abstrakte Frage: wann ist sie überhaupt (eindeutig) lösbar?
8.26 Existenz- und Eindeutigkeitssatz (Picard–Lindelöf–Peano / Cauchy–Lipschitz)
Es sei stetig, d. h.
und sogar Lipschitz-stetig bezüglich der zweiten Variablen, d. h. mit
Dann hat das Anfangswertproblem
eine eindeutige -Lösung .
Beweis: nope lol → see Figalli Skript
Connection to Linear Algebra
The linearity operator
ODE ist wie eine “Matrix Operation” → input Funktion , und wir kriegen eine neue Funktion raus.
Dann definieren wir die Matrizen und (Matrix potenziert hoch ) → sie stellen Polynome da.
Annihilation: Note the annihilation factor, if in front.
Für and since ist the “derivation operator”, we get
For higher order terms: so we have to apply times to annihilate.
That’s why for repeated roots, we add the potentiated factors in front of the solution.
Dann gilt für einen “Operator” (der zu einer Matrix corresponded)
Dann ist die ODE jetzt einfach .
Warum ist wie eine Matrix? Eine Matrix macht das folgende: , . Der Differentialoperator macht das ganze für (-mal stetig differenzierbare Funktionen) mit , ( ist ein Intervall).
- vorher sind Vektoren n-Tupeln, jetzt glatte Funktionen
Was bringt das? So wie linear ist ist es auch:
Wenn wir haben ( particular solution, der Nullspace) so gilt auch:- mit genau den Lösungen von .
Beispiel: (ODE als Matrix Problem lösen):
- Sei .
- Dann gilt
Beispiel: ODE
- Can be written using the differential operator as
where is just the characteristic polynomial with plugged in instead of .
- Introduce the state vector
- Then , and the ODE rewrites as the system where is the companion matrix
- Since , we have
Why AM = GM is impossible
In the case where AM > 1, we always need a solution with .
For a general matrix, AM = GM at a repeated eigenvalue is perfectly possible. The companion matrix (the D) can never do this. The reason comes down to one structural fact:
- The minimal polynomial of the companion matrix equals its characteristic polynomial.
Example: GM < AM
- characteristic polynomial ( → minimal polynomial is also , forcing a single Jordan block and GM .
- The top rows of are fixed
- They are what represents “differentiation”
- The ODE coefficients only appear in the last row
→ they cannot break the cyclic structure. This is why no choice of ODE can produce AM = GM at a repeated root.
Repeated Roots
Consider the constant-coefficient linear ODE .
→ characteristic polynomial is , which has the single root with multiplicity (a double root).
The general solution turns out to be .
A degree- ODE has a -dimensional solution space, so we need two independent fundamental solutions.
The double root only hands us one obvious exponential, . Where does the extra factor of in come from?
The operator viewpoint
Everything becomes transparent once we package the ODE as a single differential operator.
Differential Operator of a Polynomial
Let and let be a polynomial. The associated differential operator is
It eats a function and returns a function: .
The point of this repackaging is that ” solves the ODE” becomes the single equation .
Example: For we get
which is exactly the left-hand side of . So is the ODE.
The one identity that runs the whole show
Eigenfunction Identity
For every and every polynomial ,
Proof: The exponential is an eigenfunction of , since , and therefore . Applying term by term,
Each just pulls down a factor of , so the operator collapses to the number on this input.
Example: With ,
In particular , confirming is a solution — but this gives us only one of the two we need.
The intuition: collapsing two distinct roots
Here is the heuristic that motivates the answer. Perturb the double root into two distinct roots and , i.e. solve .
This perturbed equation has a genuinely -dimensional solution space with the clean basis .
Because is a vector space, it is closed under linear combinations, so the rescaled difference is again a solution of the perturbed equation.
This limit is by definition , which is exactly the missing second solution.
The rigorous backbone: differentiate in
The clean way to verify is a genuine solution is to differentiate the eigenfunction identity with respect to .
Repeated-Root Solution
Let . Then
In particular, if is a root of multiplicity (so and ), then , i.e. solves the ODE.
Proof: Start from and apply to both sides. The operator acts in , so it commutes with , and . The left side gives
The right side, by the product rule,
Equating the two yields the claimed formula.
When (and this holds because is a double root), the entire right side vanishes.
Example: Take (so ) and verify directly:
It checks out — and the theorem explains why without any computation: gives and , so .
Why double root is exactly :
The condition driving the theorem is not an accident; it is what root multiplicity means.
- () Multiplicity means for some polynomial . By the product rule,
Every term still carries a factor , so (and clearly ). Differentiating a factor of leaves , which still vanishes at .
- () If then , say . Then , so . The hypothesis forces , hence and therefore — multiplicity .